|
Ellina Zhang Hi! I'm Ellina Ruiya Zhang, a first-year M.S. in Robotics (MSR) student at Carnegie Mellon University's Robotics Institute, where I'm a member of the Robots Perceiving and Doing (RPAD) Lab advised by Prof. David Held. Previously, I earned my BASc in Engineering Science (Machine Intelligence) from the University of Toronto, with minors in Robotics and Mathematics. During my undergraduate studies, I worked with the Toronto Intelligent Systems Lab (TISL) advised by Prof. Igor Gilitschenski, and completed my undergraduate thesis in the Robot Vision and Learning (RVL) Lab under Prof. Florian Shkurti. My research interests lie at the intersection of computer vision and robotics, with a focus on learning-based perception and representations for robot manipulation and other real-world robotic applications. |

|
Research
|

|
aUToPath: Unified Planning and Control for Autonomous Vehicles in Urban Environments Using Hybrid Lattice and Free-Space Search
Tanmay P. Patel*, Connor Wilson*, Ellina R. Zhang*, Morgan Tran, Chang Keun Paik, Steven L. Waslander, Timothy D. Barfoot *Equal contribution CRV 2025 paper / arXiv / doi A unified online planning-and-control system that combines a hybrid lattice + free-space planner with SCP-based MPC in a single optimization loop, validated in simulation and on a real vehicle. |
|
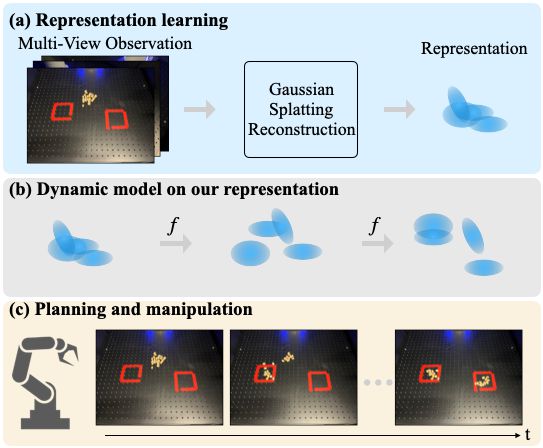
Gaussian Splatting Visual MPC for Granular Media Manipulation
Wei-Cheng Tseng, Ellina Zhang, Krishna Murthy Jatavallabhula, Florian Shkurti ICRA 2025 project page / paper / arXiv / doi Learns a dynamics model over Gaussian-splat scene representations and uses it for visual MPC to manipulate granular materials, with strong sim-to-real generalization (including zero-shot transfer). |